July 1, 1999 Apollo 17's Lunar Rover Credit: Apollo
17, NASA (Image scanned by Kipp Teague)
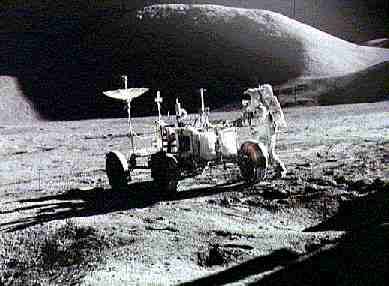
Explanation: In December of 1972, Apollo
17 astronauts Eugene Cernan and Harrison Schmitt spent about 75
hours exploring the Moon's Taurus-Littrow
valley while colleague Ronald Evans orbited overhead. Cernan and Schmitt
were the last humans to walk or ride on the Moon - aided in their explorations
by a Lunar Roving Vehicle.
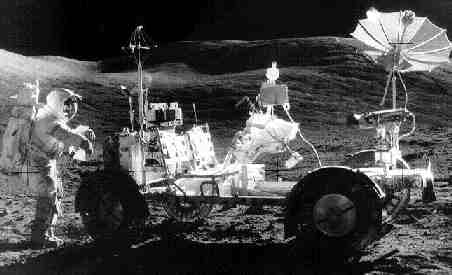
The skeletal-looking lunar rover was just over 10 feet long, 6 feet wide and
easily carried astronauts, equipment, and rock samples in
the Moon's low gravity (about 1/6 Earth's). In this picture,
Cernan stands at the back of the rover which carried the two astronauts in
lawn-chair style seats. An umbrella-shaped high gain antenna and TV camera are
mounted in the front. Powered by four 1/4 horsepower electric motors, one for
each wheel, this
rover was driven a total of about 18 miles across the
lunar surface. Its estimated top speed was nearly 8 miles per hour.
The concept of a lunar rover predated Apollo itself, with a 1950s
series in Collier's Weekly magazine by Wernher Von Braun and others, Man Will
Conquer Space Soon!, describing a six week stay on the moon, featuring ten-ton
tractor trailers for moving supplies. In the February 1964 issue of Popular
Science Von Braun, then director of NASA Marshall Space Flight Centre, discussed
the need for a lunar surface vehicle.
The author of the general idea, design and form of the Lunar Roving Vehicle was
Polish-American engineer, scientist and inventor Mieczyslaw G. Bekker.[2] The
final lightweight design, the new tires, and the folding mechanism of the
assembly, were the inventions of the Hungarian-American engineer Ferenc
Pavlics[3].
The first cost-plus-incentive-fee contract to Boeing (with Delco Electronics as
a major sub-contractor) was for $19,000,000 and called for delivery of the first
LRV by April 1, 1971, but cost overruns led to a final cost of $38,000,000. Four
lunar rovers were built, one each for Apollo missions 15, 16, and 17, and one
that was used for spare parts after the cancellation of further Apollo missions.
There were other LRV models built: a static model to assist with human factors
design, an engineering model to design and integrate the subsystems, two 1/6
gravity models for testing the deployment mechanism, a 1-gravity trainer to give
the astronauts instruction in the operation of the rover and allow them to
practice driving it, a mass model to test the effect of the rover on the Apollo
Lunar Module (LM) structure, balance and handling, a vibration test unit to
study the LRV's durability and handling of launch stresses, and a qualification
test unit to study integration of all LRV subsystems.
LRVs were used for greater surface mobility during the Apollo J-class missions
(Apollo 15, Apollo 16, and Apollo 17). The rover was first used on July 31,
1971, during the Apollo 15 mission. This greatly expanded the range of the lunar
explorers. Previous teams of astronauts were restricted to short walking
distances around the landing site due to the bulky space suit equipment required
to sustain life in the lunar environment. The rovers had a top speed of about 8
mph (13 km/h), although Gene Cernan recorded a maximum speed of 11.2 mph (18.0
km/h), giving him the (unofficial) lunar land speed record.[4]
The LRV was developed in only 17 months and yet performed all its functions on
the Moon with no major anomalies. Harrison Schmitt of Apollo 17 said, "....the
Lunar Rover proved to be the reliable, safe and flexible lunar exploration
vehicle we expected it to be. Without it, the major scientific discoveries of
Apollo 15, 16, and 17 would not have been possible; and our current
understanding of lunar evolution would not have been possible."
The LRVs did experience some minor problems, however. The rear fender extension
on the Apollo 16 LRV was lost during the mission's second EVA (extra-vehicular
activity) at station 8 when Young bumped into it while going to assist Duke. The
dust thrown up from the wheel covered the crew, the console and the
communications equipment. High battery temperatures and resulting high power
consumption ensued. No repair attempt was mentioned. The fender extension on the
Apollo 17 LRV broke when accidentally bumped by Eugene Cernan with a hammer
handle. The crew taped the extension back in place, but due to the dusty
surfaces, the tape did not adhere and the extension was lost after about one
hour of driving, causing the astronauts to be covered with dust. For the second
EVA, a replacement "fender" was made with some EVA maps, duct tape, and a pair
of clamps from inside the Lunar Module - nominally intended for the moveable
overhead light. This repair was later undone so that the clamps could be brought
back inside for launch. The maps were brought back and are now on display at the
National Air and Space Museum. The abrasion from the dust is evident on some
portions of the makeshift fender.
The color television camera mounted on the front of the LRV could be remotely
operated by Mission Control in two axes: pan and tilt. This allowed far better
television coverage of the EVA than the earlier missions. On each mission, at
the conclusion of the astronauts' stay on the surface the Commander drove the
LRV to a position away from the Lunar Module so that the camera could record the
ascent stage launch.
NASA's rovers have been abandoned and thus added to the list of artificial
objects on the Moon. Also on that list are the Soviet Union's unmanned rovers
named Lunokhod 1 and Lunokhod 2. - From Wikipedia 04-10-2010
Lunar Rover Operations
Handbook
Doc. LS006-002-2H
Prepared by the Boeing Company
LRV Systems Engineering
Huntsville, Alabama
April 19, 1971
Digital Images by Eric Jones using a Kodak DC280.
Last revised 27 June 2000.
Page 3-3,
Text - Caution and Warning Flag Actuates; Either Battery Temp Greater than
125F
Page 3-4,
Text - One Drive Motor Temp Greater Than 400F, Abnormal Imbalance Between
Batt 1 and Batt 2 Amps - Vehicle Acceleration Normal or Low
Page 3-5,
Text - Abnormal Imbalance Between Batt 1 and Batt 2 Amps - Vehicle
Acceleration Normal or Low (continued), Front (Rear) Wheels Do Not Respond
to Handcontroller Steering Commands
Page 3-6,
Text - One or More Wheels Drive While in Neutral
Page 3-7,
Text - Loss of Drive from One or More Wheels - Commanded Acceleration
Abnormally Low
Page 3-8,
Text - Commanded Vehicle Speed Abnormally High - Speed Not Variable on One
or More Wheels
Unauthorized Site:
This site and its contents are not affiliated, connected,
associated with or authorized by the individual, family,
friends, or trademarked entities utilizing any part or
the subject's entire name. Any official or affiliated
sites that are related to this subject will be hyper
linked below upon submission
and Evisum, Inc. review.
Please join us in our mission to incorporate The Congressional Evolution of the United States of America discovery-based curriculum into the classroom of every primary and secondary school in the United States of America by July 2, 2026, the nation’s 250th birthday. , the United States of America: We The
People. Click Here